
ناوبری هذلولوی
ناوبری هذلولوی اشاره به یک گروه از سیستمهای ناوبری رادیویی دارد که بر اساس تفاوت زمانی (فاز) بین امواج رادیویی در یافتی از فانوس ناوبری عمل میکند. شایان ذکر است که این سیستم بدون استفاده از یک ساعت/زمان مرجع این کار را به انجام میرساند. این زمان (تفاوت زمانی) نشانهای از تفاوت فاصله گیرنده از ایستگاههای فرستنده است. رسم تمام مکانهای بالقوه (مکان هندسی) از گیرنده برای این تأخیر اندازهگیری شده نمودارهایی از یک سری خطوط هذلولی تولید میکند. با در اختیار داشتن اندازهگیریهای بدست آمده از سیگنال دریافتی و انطباق آن با یکی از خطوط هذلولی مکان گیرنده را در دو محل متفاوت مشخص میکند. برای رفع این ابهام میتوان از هر نوع اطلاعات ناوبری دیگر استفاده نمود تا به یک نقطه مکان قطعی (دقیق) برسیم.
{kind=link}
اینگونه سیستم ها نیاز به ایستگاه های کاملاً مجزا دارند که توانایی ارسال سیگنال های با همبستگی زمانی بالا را داشته باشند. این کار به دو روش انجام می شود
- ارسال پالس های کوتاه به طور همزمان پخش می کنند
- ارسال سیگنال های پیوسته ای که فاز آنها یکسان است.
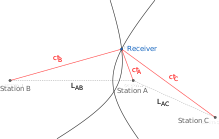
گیرنده ای که در نقطه میانی بین دو ایستگاه قرار دارد سیگنال ها را در یک زمان دریافت می کند یا به بیان دیگر سیگنال های دریافتی فاز یکسانی دارند. اما سیگنال ایستگاه نزدیکتر در هر مکان دیگر زودتر دریافت می شود در نتیجه سیگنال های ردیافتی فاز متفاوتی خواهند داشت.
تاریخچه
سیستم های مکان یابی هذلولوی برای اولین بار در طول جنگ جهانی اول در سیستم های مکان یابی صوتی برای مکان یابی توپخانه دشمن استفاده شد. صدای شلیک گلوله توسط چندین میکروفون ضبط و زمان دریافت آن به مرکز محاسباتی ارسال شد تا موقعیت توپخانه را ترسیم کنند. سپس این سیستم ها در جنگ جهانی دوم مورد استفاده قرار گرفتند. اولین سیستم ناوبری رادیویی هذلولی، سیستم ناوبری جیی در دوران جنگ جهانی دوم بود که توسط نیروی هوایی سلطنتی برای استفاده توسط فرماندهی بمب افکن RAF معرفی شد. نیروی دریایی سلطنتی در سال ۱۹۴۴ سیستم ناوبری دکا را در کنار متناظر آمریکایی آن در نیروی دریایی ایالات متحده با نام لوران (برای ناوبری دوربرد در دریا) به پیش می برد. نمونههای پس از جنگ چنین سیستم هایی، شامل سیستم معروف گارد ساحلی آمریکا لورن-سی، سیستم بینالمللی امگا ، و آلفا و چایکا (مرغ دریایی) شوروی است. همه این سیستم ها تا دهه 1990 و زمانی که به طور عمده با سیستم های ناوبری ماهواره ای مانند سیستم موقعیت یاب جهانی (GPS) جایگزین شدند، مورد استفاده قرار گرفتند.
مفاهیم پایه
ناوبری بر اساس زمان
فرض کنید دو ایستگاه رادیویی زمینی در فاصله معینی از یکدیگر (مثلاً ۳۰۰ کیلومتر) قرار گرفتهاند. در این صورت آنها با سرعت نور، دقیقاً ۱ میلی ثانیه از هم فاصله دارند. هر دو ایستگاه با فرستنده یکسان مجهز شدهاند و توانایی پخش یک پالس کوتاه در یک فرکانس خاص را دارا هستند. یکی از این ایستگاهها که به آن ثانویه میگوییم نیز با یک گیرنده رادیویی مجهز شده است. وقتی که این گیرنده سیگنال ایستگاه دیگر (که به آن اصلی میگوییم) را دریافت می کند، سیستم پخش رادیویی خود را تغییر وضعیت میدهد (روشن میکند یا خاموش میکند). در نتیجه، ایستگاه اصلی میتواند انواع مجموعهای از پالس را منتشر کند، و ثانویه نیز پس از شنیدن آنها با ۱ میلی ثانیه تأخیر آنها را بازپخش کند.
حال، یک گیرنده متحرک را در نظر بگیرید که در وسط خط واصل دو ایستگاه قرار گرفتهاست. این خط واصل را خط پایه مینامیم. با این فرضها، سیگنال تولیدی باید ۰٫۵ میلی ثانیه برای رسیدن به گیرنده تأخیر داشته باشد. با اندازهگیری این زمان، میتوان مشخص کرد که فاصله از ایستگاه فرستنده دقیقاً برابر با ۱۵۰ کیلومتر از هرکدام از ایستگاهها است. اگر گیرنده در امتداد خط پایه تغییر محل دهد، زمانبندی سیگنالها تغییر میکند. به عنوان مثال، اگر تفاوت زمانی سیگنال ها از یکدیگر ۰٫۲۵ و ۰٫۷۵ میلی ثانیه باشد، گیرنده متحرک از ایستگاهِ نزدیک ۷۵ کیلومتر، و از ایستگاه دور ۲۲۵ کیلومتر فاصله خواهد داشت.
اگر گیرنده متحرک از خط پایه فاصله بگیرد، تأخیر زمانی از هر دو ایستگاه افزایش خواهد یافت. به عنوان مثال، اگر اندازهگیری زمان تأخیر ۱ و ۱٫۵ میلی ثانیه باشد، به معنی آن است که گیرنده۳۰۰ کیلومتر از یک ایستگاه نزدیکتر و ۴۵۰ کیلومتر از ایستگاه دورتر فاصله خواد داشت. اگر یک دایره به شعاع ۳۰۰ و ۴۵۰ کیلومتر در اطراف دو ایستگاه ترسیم کنیم، دایرهها یکدیگر را در دو نقطه قطع میکنند. با استفاده از یک مرجع اطلاعات ناوبری دیگر، میتوان یکی از این دو تقاطع را حذف کرد، و به این ترتیب محل دقیق گیرنده را تعیین کرد. به عبارتی دیگر میتوان گفت که نقطه تثبیت شد.
زمان بندی مطلق و نفاضلی
یک مشکل عملی جدی با رویکرد قبلی وجود دارد. به منظور اندازهگیری زمان دریافت سیگنالها، گیرنده باید زمان دقیق ارسال سیگنال فرستاده شده را بداند. با استفاده از تکنولوژیهای الکترونیکی مدرن این مسئله خیلی بیاهمیت است. چنین کاری از عهده سیستمهای ناوبری مدرن، از جملهGPS بر میآید.
با این حال، در دهه ۱۹۳۰ اندازهگیری دقیق زمان امکانپذیر نبود. ساخت ساعتی که به اندازه کافی از دقت و صحت مورد نیاز برخوردار باشد بسیار مشکل بود. حتی قابل حمل بودن نیز بر مشکل میافزود. به عنوان مثال یک نوسانگر کریستالی درای انحراف (یا لغزش) حدود ۱ تا ۲ ثانیه در یک ماه (معادل 1.4x10 ثانیه در یک ساعت است). با وجودی که این مقدار ممکن است کوچک به نظر برسد، اما با توجه به سرعت نور (3x10 متر بر ثانیه)، این لغزش زمانی نشان دهنده یک جابجایی برابر با ۴۰۰ متر در ساعت است. تنها با گذشت چند ساعت از شروع پرواز، چنین سیستمی عملاً غیر قابل استفاده خواهد بود. جالب آنکه این مشکل تا پیش از معرفی ساعت اتمی (در دهه۱۹۶۰) در سیستم هوانوردی وجود داشت.
از سوی دیگر، اندازهگیری تفاوت بین دو سیگنال با دقت بال ممکن بود. بخش عمدهای از توسعه تجهیزات مناسب در این راستا بین سالهای ۱۹۳۵ و ۱۹۳۸ انجام شدهاست و به عنوان بخشی از تلاش برای استقرار رادار سیستم به ثمر نشست. بریتانیا بهطور خاص، سرمایهگذاری قابل توجهی را در راه توسعه خود سیستم خانه زنجیری انجام داده بود. صفحه نمایش راداری سیستم خانه زنجیری که بر اساس اسیلوسکوپ (یا اسیلوسکوپ که آنها در زمان شناخته شده بود) کار میکردند، پا به عرصه گذاشتند. پس از ارسال سیگنال توسط فرستندهها، صفحه نمایش راداری شروع به رفت و برگشت (به منظور نمایش) میکرد. سیگنال بازگشتی تقویت شده و به صفحه نمایش فرستاده میشد، این عمل باعث ایجاد یک تصویر بر روی صفحه رادار (به انگلیسی blip) میشد. با اندازهگیری فاصله در امتداد جهت صورت (راستای) اسیلوسکوپ بین دو تصویر بر روی صفحه نمایش، زمان بین پخش و دریافت سیگنال را میتوان اندازهگیری کرد؛ بنابراین محدوده هدف مشخص میشود.
با تغییر بسیار اندک، میتوان همان صفحه نمایش را جهت بدست آوردن اختلاف زمانی بین دو سیگنال مجزا مورد استفاده قرار داد. در کاربرد ناوبری، به منظور تفکیک بین فرستنده اصلی و ثانویه، هر تعداد از روشهای شناسایی که لازم باشد باید مورد استفاده قرار گیرد.
سیستمهای عملی
ماینت هارمز (به انگلیسی: Meint Harms) اولین کسی بود که برای ساخت سیستمهای ناوبری هذلولی اقدام کرد. این پروژه در سال ۱۹۳۱ تحت عنوان (به انگلیسی: musings) به عنوان قسمتی از پروژه ارشد او در دانشکده ناوبری لوبک انجام شد. پس از اخذ مدرک دکتری در زمینه ریاضیات، فیزیک و ناوبری در دانشگاه کایسرتور (به انگلیسی: Kaisertor) در لوبک، هارمز تلاش کرد که با استفاده از فرستندهها و گیرندههای ساده به پیادهسازی سیستم ناوبری هذلولوی بپردازد. در ۱۸ فوریه ۱۹۳۲ او به خاطر ابداعش، به دریافت Reichspatent-Nr. 546000 نائل شد.
Gee
اولین سیستم ناوبری هذلولی عملیاتی در دنیا، Gee بریتانیا بود و در سال 1941 توسط فرماندهی بمب افکن RAF به صورت آزمایشی مورد استفاده قرار گرفت. Gee هم برای بمباران بر فراز آلمان و هم برای ناوبری در منطقه بریتانیا، به ویژه برای فرود در شب استفاده می شد. چندین زنجیره Gee در بریتانیا ساخته شد و پس از جنگ این زنجیره به چهار زنجیره در بریتانیا، دو زنجیره در فرانسه و یکی در شمال آلمان گسترش یافت. برای دورهای پس از تشکیل سازمان بینالمللی هوانوردی غیرنظامی در سال 1946، Gee به عنوان مبنای استاندارد جهانی برای ناوبری در نظر گرفته شد، اما به جای آن سیستم دامنه همهجهه VHF یا به اختصار (VOR) انتخاب شد و در سال 1970 نیز آخرین زنجیره Gee در نهایت بسته شد.
سیگنالهای Gee از یک زنجیره معین بر روی یک فرکانس ارسال میشوند. ایستگاه اولیه دو سیگنال ارسال می کند. سیگنال "A" که شروع یک دوره زمانی را نشان می داد، و سیگنال "D" (که اساساً دو "A" است) برای نشان دادن پایان آن دوره زمانی. در هر دوره، تنها یکی از دو ایستگاه ثانویه پاسخ می دهد و سیگنال های "B" و "C" خود را به طور متناوب تغییر می دهد. الگوی حاصل "ABD...ACD...ABD..." خواهد بود. یک گیرنده باندپهن برای هماهنگی با سیگنال زنجیره و ایجاد خروجی روی اسیلوسکوپ توسط اپراتور تنظیم می شود. از آنجایی که ایستگاهها در فضای فرکانس با هم فاصله نداشتند، گاهی اوقات سیگنالهای چندین ایستگاه روی نمایشگر ظاهر میشد. برای تشخیص زنجیر در این موارد، گاهی اوقات سیگنال "A" دوم، با نام "A1" یا "شبح A" نیز ارسال می شد و الگوی چشمک زن روی نمایشگر می توانست برای شناسایی زنجیره استفاده شود.
اپراتور در ابتدا گیرنده خود را تنظیم می کرد تا جریانی از پالس ها را روی صفحه نمایش ببیند، که گاهی اوقات شامل پالس های زنجیره های دیگر می شد. زیرا که فرکانس نزدیکی داشتند. سپس یک نوسان ساز محلی را تنظیم می کرد که ردیاب اسیلوسکوپ را راه اندازی می کرد تا با ساعت ایستگاه اصلی تطابق پیدا کند ( و ممکن بود در طول زمان تغییر کند و نیاز به تنظیم مجدد داشته باشد). سپس از یک تاخیر متغیر برای حرکت ابتدای سیگنال استفاده میکند، بنابراین یکی از پالسهای "A" در سمت چپ دوربین قرار میگیرد (عملیات مشابه کلید "نگهداری افقی" در تلویزیون آنالوگ است). در نهایت سرعت ردیابی در سراسر صفحه نمایش تنظیم می شود تا پالس D فقط در سمت راست قابل مشاهده باشد. اکنون می توان فاصله پالس B یا C از پالس A را با یک مقیاس متصل اندازه گیری کرد. در انتها نیز تأخیرهای حاصل را میتوان در نمودارها و جداول ناوبری جستجو کرد.
منابع
- ↑ http://www.best-microcontroller-projects.com/ppm.html
- ↑ Festschrift 175 Jahre Seefahrtschule Lübeck
- ↑ Meldau-Steppes, Lehrbuch der Navigation, B.2, page 7.142, Bremen 1958
- ↑ Jerry Proc, "The GEE system", 14 January 2001